





推荐阅读
https://weread.qq.com/web/reader/db8329d071cc7f70db8a479kc81322c012c81e728d9d180
阅读感想
操作系统最伟大的地方就是他的抽象,将CPU虚拟化,把一个物理CPU变成了多个虚拟CPU,从而支持多个程序并发运行;通过内存虚拟化,将物理内存抽象为多个巨大的、高速的虚拟内存,让每一个进程都以为自己拥有无限大内存空间。
第4章 进程
运行的程序就是进程,操作系统有很多关于进程的API,
·创建(create):操作系统必须包含一些创建新进程的方法。在shell中键入命令或双击应用程序图标时,会调用操作系统来创建新进程,运行指定的程序。
·销毁(destroy):由于存在创建进程的接口,因此系统还提供了一个强制销毁进程的接口。当然,很多进程会在运行完成后自行退出。但是,如果它们不退出,用户可能希望终止它们,因此停止失控进程的接口非常有用。
·等待(wait):有时等待进程停止运行是有用的,因此经常提供某种等待接口。
·其他控制(miscellaneous control):除了杀死或等待进程外,有时还可能有其他控制。例如,大多数操作系统提供某种方法来暂停进程(停止运行一段时间),然后恢复(继续运行)。
·状态(status):通常也有一些接口可以获得有关进程的状态信息,例如运行了多长时间,或者处于什么状态。
把程序和静态数据加载到内存,然后执行他就成了进程,现代操作系统将加载的过程lazily懒惰化了,需要用的时候才加载
进程有三个状态,运行、就绪、阻塞
第5章 进程API
fork , 复制当前的进程,父进程返回子进程pid,子进程返回0
wait,父进程等待子进程执行完毕
exec,加载某个程序到内存中运行,覆盖当前进程
shell也是一个用户程序[插图],它首先显示一个提示符(prompt),然后等待用户输入。你可以向它输入一个命令(一个可执行程序的名称及需要的参数),大多数情况下,shell可以在文件系统中找到这个可执行程序,调用fork()创建新进程,并调用exec()的某个变体来执行这个可执行程序,调用wait()等待该命令完成。子进程执行结束后,shell从wait()返回并再次输出一个提示符,等待用户输入下一条命令。
第6章 机制:受限直接执行
OS不可能说,创建了一个进程,把所有权限完全交给进程,然后把自己挂起,那坏蛋写一个死循环,我们就只能重启计算机了,OS会把CPU交给进程,但是他如何拿回来呢?
答案很简单,许多年前构建计算机系统的许多人都发现了:时钟中断(timer interrupt)[M+63]。时钟设备可以编程为每隔几毫秒产生一次中断。产生中断时,当前正在运行的进程停止,操作系统中预先配置的中断处理程序(interrupt handler)会运行。此时,操作系统重新获得CPU的控制权,因此可以做它想做的事:停止当前进程,并启动另一个进程。
第8章 调度:多级反馈队列
·规则1:如果A的优先级 > B的优先级,运行A(不运行B)。
·规则2:如果A的优先级 = B的优先级,轮转运行A和B。
·规则3:工作进入系统时,放在最高优先级(最上层队列)。
·规则4:一旦工作用完了其在某一层中的时间配额(无论中间主动放弃了多少次CPU),就降低其优先级(移入低一级队列)。
·规则5:经过一段时间S,就将系统中所有工作重新加入最高优先级队列。
规则4是反馈
规则5可避免饥饿
第9章 调度: 比例份额
彩票调度
很多人都买过彩票,但是很少有人中奖,我们假设有100张彩票,有AB两个人分别买了75张和25张,然后我们进行随机开奖,开到一张票,这张票在谁手上谁就中奖。
同理,我们假设AB是两个进程,则中奖的那位就能获得CPU控制权。
彩票货币
如果进程可以将自己的彩票分配给自己的线程,则实现了彩票货币化。
彩票转让
一个进程可以吧自己的彩票分给其他进程,例如客户端把彩票分给服务端以加快服务端处理速度。
彩票通胀
最后,彩票通胀(ticket inflation)有时也很有用。利用通胀,一个进程可以临时提升或降低自己拥有的彩票数量。当然在竞争环境中,进程之间互相不信任,这种机制就没什么意义。
算法实现
我们只需要记录每个进程拥有多少彩票,并把他们排好,然后OS生产随机数,从第一个进程开始,对彩票数进行累加,当累和第一次超过随机数时,这个进程中奖。
我们还可以对进程按照彩票数从大到小排好序,这样可以加快遍历速度。
步长调度
A、B、C这3个工作的票数分别是100、50和250,我们通过用一个大数分别除以他们的票数来获得每个进程的步长。比如用10000除以这些票数值,得到了3个进程的步长分别为100、200和40。我们称这个值为每个进程的步长(stride)。每次进程运行后,我们会让它的计数器 [称为行程(pass)值] 增加它的步长,记录它的总体进展。
当进行调度的时候,取出行程最小的进程进行调度,如果有多个,则从中随机选择任意一个。
第10章 多处理器调度(高级)
问题
- 缓存一致性: CPU1修改了自己的缓存,但是CPU2没有同步修改怎么办?
硬件提供了这个问题的基本解决方案:通过监控内存访问,硬件可以保证获得正确的数据,并保证共享内存的唯一性。在基于总线的系统中,一种方式是使用总线窥探(bus snooping)[G83]。每个缓存都通过监听链接所有缓存和内存的总线,来发现内存访问。如果CPU发现对它放在缓存中的数据的更新,会作废(invalidate)本地副本(从缓存中移除),或更新(update)它(修改为新值)。回写缓存,如上面提到的,让事情更复杂(由于对内存的写入稍后才会看到),你可以想想基本方案如何工作
- 并行(发)问题:
如果线程1执行第一行,会将head的当前值存入它的tmp变量。如果线程2接着也执行第一行,它也会将同样的head值存入它自己的私有tmp变量(tmp在栈上分配,因此每个线程都有自己的私有存储)。因此,两个线程会尝试删除同一个链表头,而不是每个线程移除一个元素,
1 | void rease(){ |
- 缓存亲和度: 一个线程在某个CPU上运行,他会有一些缓存,如果他切换到其他CPU上,则缓存需要重新加载。
单队列多处理器调度
(Single QueueMultiprocessor Scheduling,SQMS) 一个队列,处理器需要执行时,锁住队列,然后从队列取出任务,最后释放锁,但是他不好解决亲和度问题和锁的问题。
多队列多处理器调度
(Multi-QueueMultiprocessor Scheduling,MQMS)多个队列,一般而言,一个处理器一个队列,如果任务数量能整除CPU数量,这很好分配,无法整除的时候,就涉及到了负载不均的问题。
最明显的答案是让工作移动,这种技术我们称为迁移(migration)。通过工作的跨CPU迁移,可以真正实现负载均衡。
注意我们要让任务轮流迁移,否则就不太公平
另一个方法是窃取工作量少的队列不定期偷看其他队列,如果发现他比自己多,则偷取一个任务。
如果太频繁地检查其他队列,就会带来较高的开销,可扩展性不好,而这是多队列调度最初的全部目标!相反,如果检查间隔太长,又可能会带来严重的负载不均。
第15章 机制:地址转换
动态(基于硬件)重定位
即基址加界限机制,所有的程序都认为自己的地址空间从0开始,但是当他执行的时候,操作系统会决定其在物理内存中的实际加载地址,并将起始地址记录在基址寄存器中。
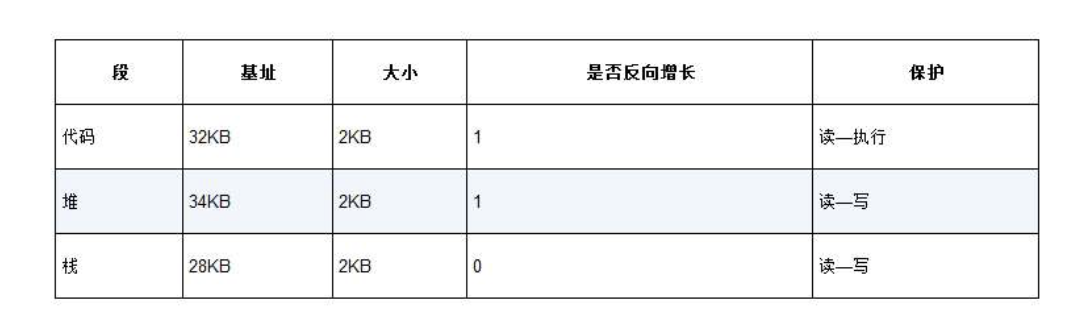
第16章 分段
问题:栈和堆之间,有一大块“空闲”空间,造成了浪费
在硬件中使用三对寄存器来分别记录代码段,堆和栈
问题: 如何判断一个地址是代码段,堆还是栈?
虚拟地址前两位表示
问题: 如何共享?
操作系统为段记录额外信息,
第17章 空闲空间管理
要满足变长的分配请求,应该如何管理空闲空间?什么策略可以让碎片最小化?不同方法的时间和空间开销如何?
OS如何知道free的内存有多大?
在C中,每当我们使用malloc的时候,OS会给我们分配一块内存,当我们使用free的时候,这块内存会被释放,然而这个时候OS如何知道这块内存有多大,他该如何来释放呢?
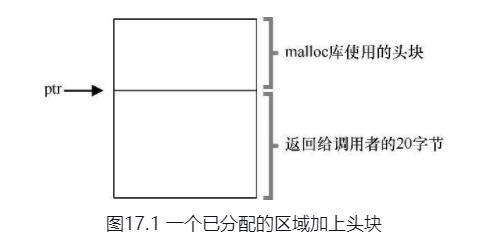
其实malloc返回给我们的内存是小于OS给我们的内存的,可以看到OS在这块内存的前面加了一些信息,包括内存的大小和一个校验部分。
OS如何组织空闲内存?
每块内存的开头都有一个部分,包括这块内存的大小以及下一块内存的地址
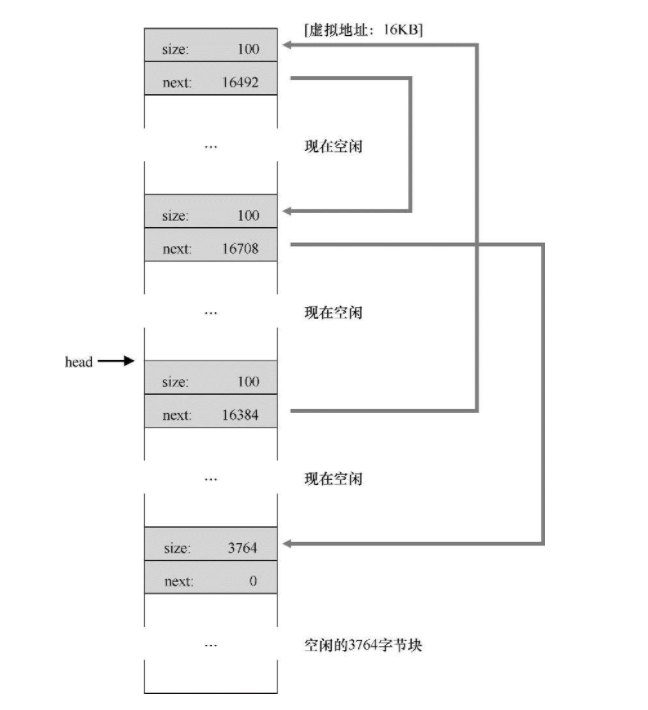
内存分配和释放
OS分配内存的时候,会在他的内存链表中找到一块合适的,将其切割并移除链表分配给应用程序,当OS回收的时候,会将其放回链表,但是这个办法经历了长时间的内存管理以后,OS的内存将会一团糟,这个时候操作系统又会合并相邻块,之后内存又成为了一个整体。
如何选择链表中的内存块?
| 匹配算法 | 备注 | |
|---|---|---|
| 最优匹配 | 在所有可以分割的节点中,选择内存最小的那个节点 | |
| 最差匹配 | 在所有可以分割的节点中,选择内存最大的那个节点 | |
| 首次匹配 | 寻找过程中,发现的第一个能匹配的节点 | |
| 下次匹配 | 在首次匹配的基础上,每次查询的链表起点就是上一次匹配的节点 |
有趣的匹配算法
分离空闲列表:
如果某个应用程序经常申请一种(或几种)大小的内存空间,那就用一个独立的列表,只管理这样大小的对象。其他大小的请求都交给更通用的内存分配程序。
伙伴系统:
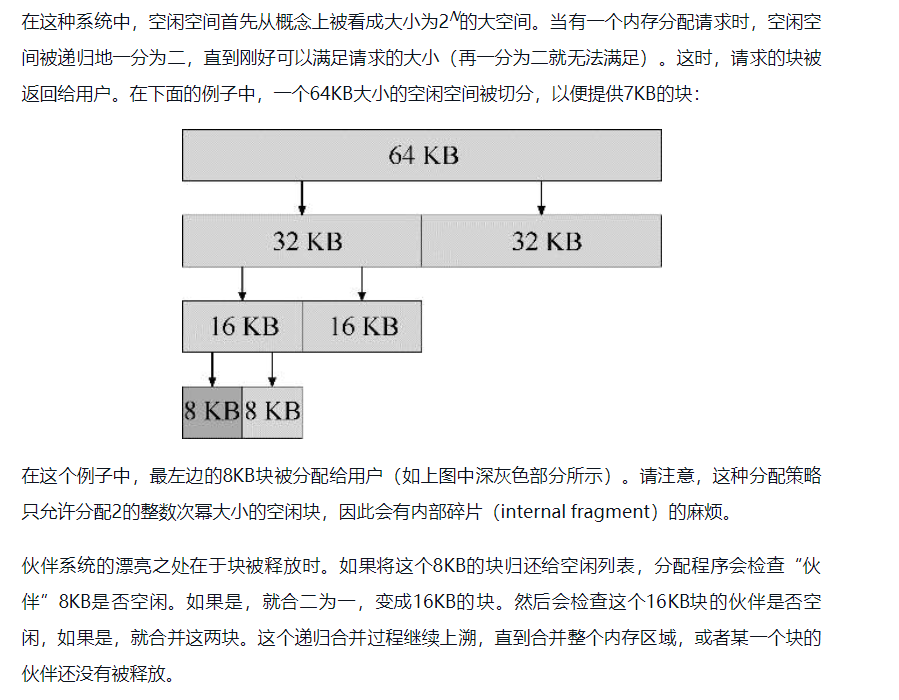
第18章 分页:介绍
页表是什么,在哪里?
用一张表,储存虚拟地址到物理地址的映射,往往虚拟地址和物理地址的前几位是不同的,这些不同的位被称为页,而剩下的成为偏移量。从虚拟地址映射到物理地址只需要将前几位进行转换即可,这张表就叫做页表。
页表储存在内存中,每个进程都拥有一份自己的页表。
页表中有什么
页表往往是一个数组映射,所以没有物理叶帧(数组下标)
| 代号 | 意义 | 备注 |
|---|---|---|
| P | 存在位 | 表示该页表是否被进程申请使用 |
| R/W | 读写权限位 | 表示该页面权限是可读还是可写 |
| U/S | 访问是否需要特权级 | |
| PWT | ||
| PCD | ||
| A | 访问位 | 近期是否访问过该页 |
| D | 脏位 | 该页是否被写 |
| PAT | ||
| G | ||
| ? | 操作系统自定义使用 | |
| PFN | 叶帧 |

分页很慢
分页机制导致与内存发生的交互次数翻倍了,程序更慢了。
第19章 分页:快速地址转换(TLB)
高速页表缓冲区:地址转换旁路缓冲存储器(translation-lookasidebuffer)
这是一个硬件,他能缓存页表地址转化,速度远高于内存读取
TLB未命中
TLB和其他缓存相似,前提是在一般情况下,转换映射会在缓存中(即命中)。如果是这样,只增加了很少的开销,因为TLB处理器核心附近,设计的访问速度很快。如果TLB未命中,就会带来很大的分页开销。必须访问页表来查找转换映射,导致一次额外的内存引用(或者更多,如果页表更复杂)。如果这经常发生,程序的运行就会显著变慢。相对于大多数CPU指令,内存访问开销很大,TLB未命中导致更多内存访问。因此,我们希望尽可能避免TLB未命中。
一般是操作系统来处理未命中,发生未命中,硬件抛异常,进入内核,陷入操作系统,操作系统更新TLB,返回之前的未命中代码进行重试
重点细节:
- 返回进入陷阱的那条代码重试。
- OS千万不能在处理TLB时又触发未命中,这将导致无限递归。
进程上下文切换
页表是进程私有的,如果发生了进程上下文切换,则TLB全部变为无效。
上下文切换的时候清空TLB,这是一个可行的解决方案,进程不会再读到错误的地址映射。但是,有一定开销:每次进程运行,当它访问数据和代码页时,都会触发TLB未命中。如果操作系统频繁地切换进程,这种开销会很高。
为了减少这种开销,一些系统增加了硬件支持,实现跨上下文切换的TLB共享。比如有的系统在TLB中添加了一个地址空间标识符(Address Space Identifier,ASID)。可以把ASID看作是进程标识符(Process Identifier,PID),但通常比PID位数少(PID一般32位,ASID一般是8位)。
TLB项中有什么
TLB是并行硬件,他可以并行查找
| 代号 | 意义 | 备注 |
|---|---|---|
| VPN | ||
| R/W | 全局位 | 是否全局共享 |
| PWT | 进程空间 | 属于哪个进程 |
| PFN | ||
| C | 一致位 | 决定硬件如何缓存 |
| D | 脏位 | 是否被写入新数据 |
| V | 有效位 | 该映射是否有效(注意区别页表的存在位) |

第20章 分页:较小的表
页表太大,因此消耗的内存太多。
假设一个32位地址空间(232字节),4KB(212字节)的页和一个4字节的页表项。一个地址空间中大约有一百万个虚拟页面(232/212)。乘以页表项的大小,你会发现页表大小为4MB。
使用更大的页
这种方法的主要问题在于,大内存页会导致每页内的浪费,这被称为内部碎片(internalfragmentation)问题
结合分段
我们可能有3个页表,地址空间的代码、堆和栈部分各有一个
杂合方案的关键区别在于,每个分段都有界限寄存器,每个界限寄存器保存了段中最大有效页的值。
分段并不像我们需要的那样灵活,因为它假定地址空间有一定的使用模式。例如,如果有一个大而稀疏的堆,仍然可能导致大量的页表浪费。
多级页表
分配更多级的页表,这是使用时间换空间
反向页表
记录物理页映射到虚拟页,而不是虚拟页映射到物理页
第21章 超越物理内存:机制
我们的内存始终是有限的,如何超越这个限制,为应用程序提供无限空间的假象呢?
操作系统如何利用大而慢的设备,透明地提供巨大虚拟地址空间的假象?
操作系统利用大而慢的磁盘和内存中的数据进行交换,借此实现了超越物理内存的目的。
页错误
如果一个页不存在,它已被交换到硬盘,在处理页错误的时候,操作系统需要将该页交换到内存中。那么,问题来了:操作系统如何知道所需的页在哪儿?在许多系统中,页表是存储这些信息最自然的地方。因此,操作系统可以用PTE中的某些位来存储硬盘地址,这些位通常用来存储像页的PFN这样的数据。当操作系统接收到页错误时,它会在PTE中查找地址,并将请求发送到硬盘,将页读取到内存中。
交换何时发生?
OS不会等到内存完全满了才进行交换,OS往往会预留BUF。
为了保证有少量的空闲内存,大多数操作系统会设置高水位线(High Watermark,HW)和低水位线(Low Watermark,LW),来帮助决定何时从内存中清除页。原理是这样:当操作系统发现有少于LW个页可用时,后台负责释放内存的线程会开始运行,直到有HW个可用的物理页。这个后台线程有时称为交换守护进程(swap daemon)或页守护进程(page daemon)[插图],它然后会很开心地进入休眠状态,因为它毕竟为操作系统释放了一些内存
第22章 超越物理内存:策略
最优替换策略
只存在于理论上的策略,他的作用是评估其他算法
FIFO
先进先出
补充:Belady的异常Belady(最优策略发明者)及其同事发现了一个有意思的引用序列[BNS69]。内存引用顺序是:1,2,3,4,1,2,5,1,2,3,4,5。他们正在研究的替换策略是FIFO。有趣的问题:当缓存大小从3变成4时,缓存命中率如何变化?
一般来说,当缓存变大时,缓存命中率是会提高的(变好)。但在这个例子,采用FIFO,命中率反而下降了!你可以自己计算一下缓存命中和未命中次数。这种奇怪的现象被称为Belady的异常(Belady’s Anomaly)。
其他一些策略,比如LRU,不会遇到这个问题。可以猜猜为什么?事实证明,LRU具有所谓的栈特性(stack property)[M+70]。对于具有这个性质的算法,大小为N + 1的缓存自然包括大小为N的缓存的内容。因此,当增加缓存大小时,缓存命中率至少保证不变,有可能提高。先进先出(FIFO)和随机(Random)等显然没有栈特性,因此容易出现异常行为。
随机
随机选择一个换出去
LRU
最近最少使用的页面,在最近的一段时间访问的页面中,过了很久都没有访问的那个页面,踢出去,这个算法速度较慢
近似LRU(时钟算法)
每当页被引用(即读或写)时,硬件将使用位设置为1。但是,硬件不会清除该位(即将其设置为0),这由操作系统负责
时钟指针(clock hand)开始时指向某个特定的页(哪个页不重要)。当必须进行页替换时,操作系统检查当前指向的页P的使用位是1还是0。如果是1,则意味着页面P最近被使用,因此不适合被替换。然后,P的使用位设置为0,时钟指针递增到下一页(P + 1)。该算法一直持续到找到一个使用位为0的页,使用位为0意味着这个页最近没有被使用过
脏页问题
如果一个页被修改,他会变成脏页,踢出去必须写回磁盘,这非常昂贵
为了支持这种行为,硬件应该包括一个修改位(modified bit,又名脏位,dirty bit)。每次写入页时都会设置此位,因此可以将其合并到页面替换算法中。例如,时钟算法可以被改变,以扫描既未使用又干净的页先踢出。
抖动
当内存超额的时候,系统疯狂的进行换页,这被称为抖动。现代操作系统一旦检测到抖动,就会将某些内存密集型进程杀死。
第28章 锁
笔者: 从这一章开始,到并发结束,都很难
我们希望原子式执行一系列指令,但由于单处理器上的中断(或者多个线程在多处理器上并发执行),我们做不到
如何评价一个锁?
首先是锁能否完成它的基本任务,即互斥;第二是公平性;最后是性能
控制中断
早期的解决方案是在临界区关闭中断。他有很多缺点
这种方法要求我们允许所有调用线程执行特权操作,这会导致很多麻烦,贪婪的线程独占CPU,恶意的程序死循环,系统就崩溃了
无法支持多CPU
丢失中断
效率低下
Peterson算法
一段时间以来,出于某种原因,大家都热衷于研究不依赖硬件支持的锁机制。后来这些工作都没有太多意义,因为只需要很少的硬件支持,实现锁就会容易很多(实际在多处理器的早期,就有这些硬件支持)。而且上面提到的方法无法运行在现代硬件(应为松散内存一致性模型),导致它们更加没有用处。更多的相关研究也湮没在历史中……
Test And Set
这是一个操作系统原子指令,把一个内存变量赋予新的值,并返回旧的值。
然后我们就可以实现锁了
1 | // 操作系统原语伪代码 |
这个锁是正确的,但是他没办法保证公平,会出现饿死,在单CPU上他的性能很差,如果一个线程获取锁失败,他会一直自旋,直到时间片用完,在多CPU(线程数=CPU数)上表现不错
Compare And Swap
比较并交换,如果和旧值相等,就赋值,否则什么也不做
这个算法和上面的test and set区别其实不大
1 | // 操作系统原语伪代码 |
链接的加载和条件式存储指令
这个算法和test and set也是一样
1 | // 操作系统原语伪代码 |
Fetch And Add
返回旧值并让这个值加一
1 | // 操作系统原语伪代码 |
这个方法其实比较厉害,他能保证公平
自旋太费CPU了
让我稍微改进一下testAndSet的lock函数,新的方法避免了自旋,但是他依然会出现饥饿,例如一个线程每次都yield,另一个线程一直进出临界区
1 | // 继承TasLock |
休眠队列
我们可以改进TasLock锁, 改进之后的锁产生饥饿的概率变小了,唯一的自旋出现在内置tasLock中,但是这个锁等待的时间是有限的
1 | struct SleepQueueLock { |
最后,你可能注意到解决方案中的竞争条件,就在park()调用之前。如果不凑巧,一个线程将要park,假定它应该睡到锁可用时。这时切换到另一个线程(比如持有锁的线程),这可能会导致麻烦。比如,如果该线程随后释放了锁。接下来第一个线程的park会永远睡下去(可能)。这种问题有时称为唤醒/等待竞争(wakeup/waiting race)。为了避免这种情况,我们需要额外的工作。Solaris通过增加了第三个系统调用separk()来解决这一问题。通过setpark(),一个线程表明自己马上要park。如果刚好另一个线程被调度,并且调用了unpark,那么后续的park调用就会直接返回,而不是一直睡眠。
两阶段锁
先自旋一段时间,如果还是没有获得锁,就直接睡眠。
第29章 基于锁的并发数据结构
并发计数器
1 | struct Counter { |
这个并发计数器遵循了最简单的结构,即直接加锁。他唯一不好的地方就是他的性能太差,并发度很低。
惰性并发计数器
1 | struct LazyCounter { |
惰性并发计数器为每一个线程分配了一个自己的惰性累和,只有当这个累和打到了阈值以后,才会加入到全局的累和中。这个数据结构提高了并发度。
并发链表
1 | struct List { |
从代码中可以看出,代码插入函数入口处获取锁,结束时释放锁。如果new失败(在极少的时候),会有一点小问题,在这种情况下,代码在插入失败之前,必须释放锁。
事实表明,这种异常控制流容易产生错误。最近一个Linux内核补丁的研究表明,有40%都是这种很少发生的代码路径(实际上,这个发现启发了我们自己的一些研究,我们从Linux文件系统中移除了所有内存失败的路径,得到了更健壮的系统[S+11])。
另一方面,锁的粒度还可以更小
1 | void insert(int value) { |
过手锁
原理也很简单。每个节点都有一个锁,替代之前整个链表一个锁。遍历链表的时候,首先抢占下一个节点的锁,然后释放当前节点的锁。
从概念上说,过手锁链表有点道理,它增加了链表操作的并发程度。但是实际上,在遍历的时候,每个节点获取锁、释放锁的开销巨大,很难比单锁的方法快。即使有大量的线程和很大的链表,这种并发的方案也不一定会比单锁的方案快。也许某种杂合的方案(一定数量的节点用一个锁)值得去研究。
如果方案带来了大量的开销(例如,频繁地获取锁、释放锁),那么高并发就没有什么意义。如果简单的方案很少用到高开销的调用,通常会很有效。增加更多的锁和复杂性可能会适得其反。
并发队列
第一个方法依然是加一个大锁,这很简单。现在我们考虑其他做法。
另一个方法是对队首和队尾分别加锁。
1 | struct Queue { |
并发散列表
我们可以直接利用前面的并发链表来实现并发散列表,不需要增加额外的锁。
第30章 条件变量
wait与signal
前面我们了解了锁,但是锁并非并发程序设计所需的唯一原语。
具体来说,在很多情况下,线程需要检查某一条件(condition)满足之后,才会继续运行。例如,父线程需要检查子线程是否执行完毕 [这常被称为join()]。
下面展示一个使用wait()和signal()实现的父线程等待子线程的情况,
当线程睡眠可以调用wait,线程被唤醒时会自动获取锁
当另一个线程想要唤醒在这个条件变量上等待的线程时,可以调用signal,当然唤醒后不一定马上切换过去运行
1 | struct Condition { |
生产者消费者
我们假设只有一个生产者,一个消费者,
1 | Condition *condition; |
如果只有一个消费者和一个生产者,这个代码正常工作,但是如果违反了这两个条件,这段代码会出现两个问题。
暂停思考
暂停思考
暂停思考
暂停思考
- 8行和20行不能使用if,应该是while,例如一个消费者首先wait,然后一个生产者生产并signal,接着又一个消费者抢先获取锁,并进行了消费,最后CPU调度到第一个消费者时,他已经执行过if,直接强行消费,主要原因因为被唤醒后不一定直接执行,CPU可能调度其他线程,
- 生产者应该唤醒消费者,消费者应该唤醒生产者
1 | Condition *empty; |
覆盖条件
即唤醒所有的线程,而不是signal中的唤醒一个。
第31章 信号量
Dijkstra及其同事发明了信号量,作为与同步有关的所有工作的唯一原语。你会看到,可以使用信号量作为锁和条件变量
接下来是信号量的定义
1 | struct Semaphore { |
二值信号量(锁)
如果初始信号量为1, 则信号量就是锁
信号量作为条件变量
如果初始信号量为0,则信号量就是条件变量
生产者与消费者
先来一个很简单的有bug的代码,来找找bug(一个)
1 | Semaphore *fill = new Semaphore(0); // |
bug很明显,没有锁。如果有多个生产者,他们会同时执行第7行,这将导致很明显的并发问题,我们通过下面的代码直接加锁,但是这和条件变量相比,还是有一点问题,他会死锁,由于条件变量的wait会释放锁,但是信号量却不会。
1 | Semaphore *fill = new Semaphore(0); // |
最后我们交换锁的位置,这个程序就并发安全了。但是为什么?又该如何证明一个程序时并发安全的?
1 | Semaphore *fill = new Semaphore(0); // |
读写锁,哲学家进餐,吸烟者问题,理发师问题?
再见。代码谁都可以看懂,但是你知道如何证明他是对的吗?
实现信号量
让我们用锁和条件变量来实现信号量
1 | struct Semaphore { |
第32章 常见并发问题
非死锁问题
Lu的研究表明,非死锁问题占了并发问题的大多数。它们是怎么发生的?我们如何修复?我们现在主要讨论其中两种:违反原子性(atomicity violation)缺陷和错误顺序(order violation)缺陷
死锁问题
循环等待
让锁具有偏序关系,Linux中的内存映射代码就是偏序锁。尽管如此依然容易犯错,比如当一个程序要获取多个锁,可能会lock(Mutex *mu1,Mutex *mu2*),如果两个线程像下面这样,依然会死锁。
1 | // thread1: |
我们可以通过按照锁的地址顺序,来对锁进行依次加锁。
持有并等待
他需要一次性获取所有的锁,但这不利于封装
非抢占
这不现实,但是一般我们使用tryLock()来获取锁,如果失败就释放这段时间获取的所有的锁,然后重试。
1 | top: |
但这会引发活锁,如果两个线程不断重复获取对方的锁,并在失败时释放自己的锁,无限循环,谁也无法获取全部锁。
互斥
避免互斥往往很难,我们一般是使用无等待数据结构,比如利用CAS等操作
通过调度
这需要了解线程需要的锁有哪些,让那些可能会共同持有一把锁的线程不重叠运行即可,但这会限制并发
检查与恢复
定期检查死锁,发现死锁则重启系统
第33章 基于事件的并发(进阶)
我们使用的基本方法就是基于事件的并发(event-based concurrency)。该方法很简单:我们等待某事(即“事件”)发生;当它发生时,检查事件类型,然后做少量的相应工作(可能是I/O请求,或者调度其他事件准备后续处理)。这就好了!
1 | while(true) { |
但是这个getEvents要怎么写呢?
select
1 | man select |
1 | int select(int nfds, fd_set *readfds, fd_set *writefds, |
要如何使用它呢?我们先调用select,然后使用for遍历readfds来检查是否有事件发生,一旦发生了事件我们就可以传给服务器解决了。
FD_ZERO() clears a set. FD_SET() and FD_CLR() respectively add and remove a given file descriptor from a set. FD_ISSET() tests to
see if a file descriptor is part of the set; this is useful after select() returns.
1 |
|
阻塞
如果在事件服务器中出现了阻塞调用,那么整个系统都将被阻塞,这是极其严重的错误!
异步IO
1 | man aio |
1 |
|
填充这个结构体以后,我们使用异步IO,如果成功,它会立即返回。
1 | int aio_read(struct aiocb *aiocbp); |
最后我们用aid_eror来检查io是否完成
1 | int aio_error(const struct aiocb *aiocbp); |
状态管理
在多线程程序中,如果一个线程阻塞,当他苏醒时,他的状态依然保存在上下文中,但是对于基于事件的系统,就没有那个容易了,他只有一个线程,他的状态放在哪儿呢?
对于IO,解决方案是上下文信息记录在由文件描述符(fd)索引的某种数据结构(例如,散列表)中。当磁盘I/O完成时,通过数据结构恢复上下文。
更多问题
多核CPU的事件服务器必须加入锁的控制
如果发生页错误,整个服务器都将被阻塞,这个阻塞是隐式阻塞
第36章 I/O设备
操作系统架构
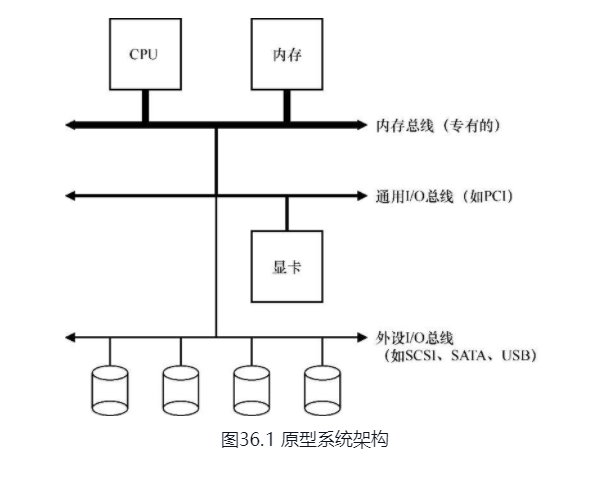
由于高性能总线造价高,所以内存总线很短,CPU与内存很接近。
设备协议
一个(简化的)设备接口包含3个寄存器:一个状态(status)寄存器,可以读取并查看设备的当前状态;一个命令(command)寄存器,用于通知设备执行某个具体任务;一个数据(data)寄存器,将数据传给设备或从设备接收数据。通过读写这些寄存器,操作系统可以控制设备的行为。
该协议包含4步。第1步,操作系统通过反复读取状态寄存器,等待设备进入可以接收命令的就绪状态。我们称之为轮询(polling)设备(基本上,就是问它正在做什么)。第2步,操作系统下发数据到数据寄存器。例如,你可以想象如果这是一个磁盘,需要多次写入操作,将一个磁盘块(比如4KB)传递给设备。如果主CPU参与数据移动(就像这个示例协议一样),我们就称之为编程的I/O(programmed I/O,PIO)。第3步,操作系统将命令写入命令寄存器;这样设备就知道数据已经准备好了,它应该开始执行命令。最后一步,操作系统再次通过不断轮询设备,等待并判断设备是否执行完成命令(有可能得到一个指示成功或失败的错误码)。
利用中断
有了中断后,CPU 不再需要不断轮询设备,而是向设备发出一个请求,然后就可以让对应进程睡眠,切换执行其他任务。当设备完成了自身操作,会抛出一个硬件中断,引发CPU跳转执行操作系统预先定义好的中断服务例程(Interrupt Service Routine,ISR),或更为简单的中断处理程序(interrupthandler)。
为什么要这样设计,因为IO要远比CPU慢,如果我们有一个和CPU速度一样的IO设备,我们就不需要中断,中断产生的上下文切换反而会影响系统的速度。
活锁
由于大量中断的出现,导致CPU不停的进行上下文切换,引发过载,从而无法处理任何请求,在网络传输中,如果每个包都引发一次中断,就会导致活锁,往往通过合并中断来处理这种情况。
设备在抛出中断之前往往会等待一小段时间,在此期间,其他请求可能很快完成,因此多次中断可以合并为一次中断抛出,从而降低处理中断的代价。
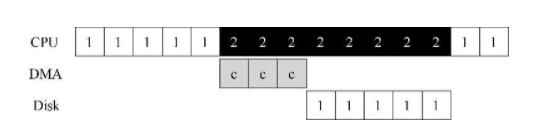
DMA(Direct Memory Access)
在PIO(programmed I/O)中,CPU会花费大量时间将数据传给设备,这浪费了CPU资源,如下图中的c部分

DMA的引入,CPU只需要通知DMA设备,DMA设备会帮助CPU执行c部分,当DMA处理完成以后,他会触发中断,让CPU完成接下来的任务
CPU如何与设备交互
IO指令,x86直接使用IO指令来与硬件交互。
内存映射IO,操作系统只需要将数据写入或者读取到某内存地址,即完成了硬件的交互,比如显卡在内存中就有一块映射。
第37章 磁盘驱动器
读写
磁盘驱动器由大量扇区组成,每个扇区512B,驱动器制造商保证每个扇区的写入是原子的,读取可以支持多个扇区一次性读入。
磁盘结构
圆的,每一圈都是一个磁道,每个磁道有多个扇区
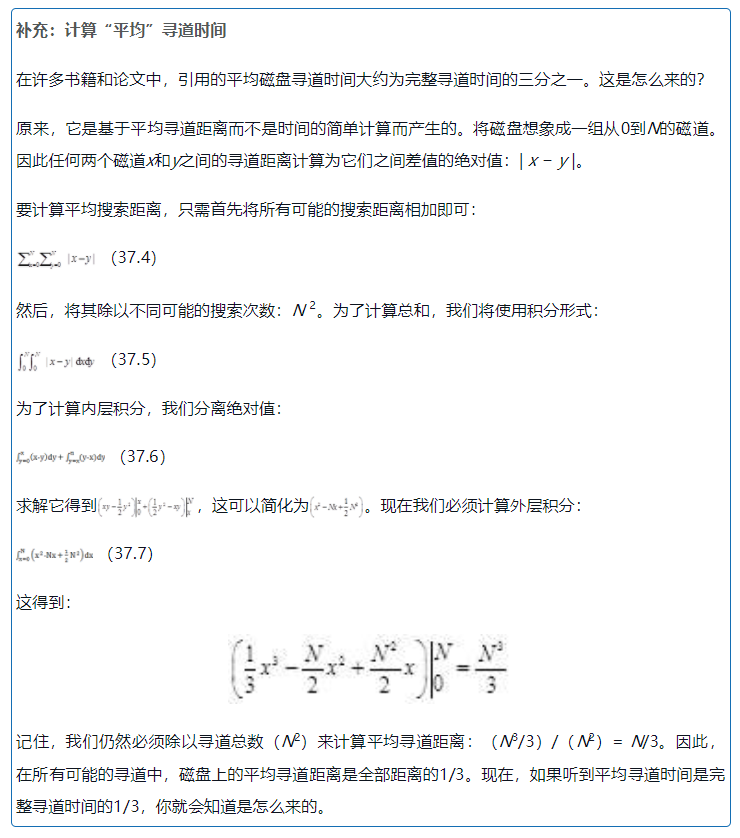
匪夷所思的平均寻道时间
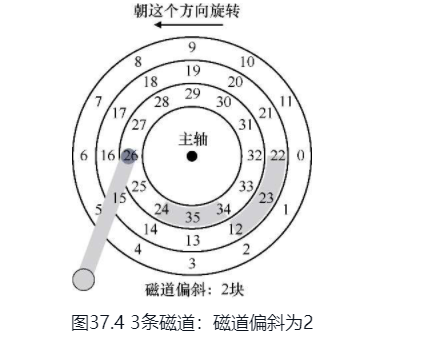
磁盘调度
操作系统应该如何设计磁盘的IO顺序呢?磁盘读写全部依赖磁头。磁头先定位磁道,然后定位扇区,最后读取数据。但是先读哪里,后读哪里?先写哪里后写哪里?
| 简称 | 全称 | 中文名 | 备注 | 问题 |
|---|---|---|---|---|
| SSTF | shortest seek time first | 最短寻道时间 | 只考虑磁道,哪个IO磁道近就去哪儿 | 饥饿,无法利用几何结构 |
| NBF | nearest block first | 最近块优先 | 考虑磁盘的物理距离 | 饥饿 |
| SCAN | 电梯算法 | 按电梯顺序扫描磁道 | 没有考虑旋转 | |
| SPTF | shortest positioning time first | 最短接入时间 | 同时考虑寻道和定位的时间 |
第38章 廉价冗余磁盘阵列(RAID)
提出问题
磁盘很小,磁盘很慢,磁盘不可靠
RAID的简介
优点
- RAID外部接口和普通磁盘一致,可以无缝接入
- 可以通过并行读取加快IO速度
- 由于冗余的存在,RAID非常可靠
RAID内部十分复杂,包括处理器,内存和磁盘,他甚至是一个非常专业的计算机系统
RAID有三个重要的设计,RAID 0级别, RAID 1级, RAID 4/5级
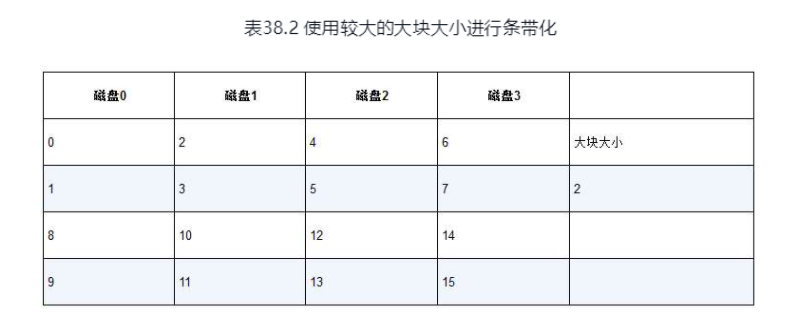
RAID 0级: 条带化
无冗余,性能很高,容量最大
通过交错的方式,将块分布在各个磁盘上, 如果我们读取0-3,便可以并行读取4个磁盘

还支持更大的块
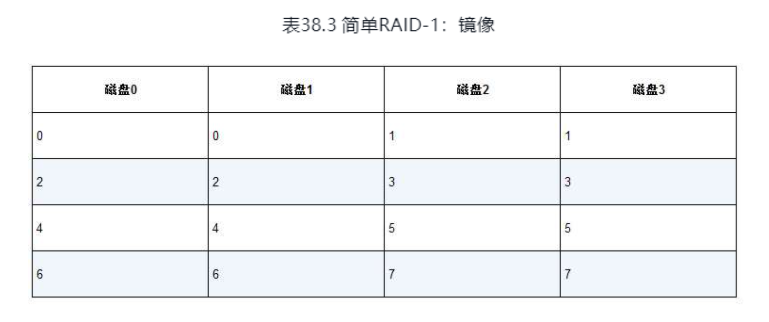
RAID 1级: 镜像
为每一个块设计一些副本
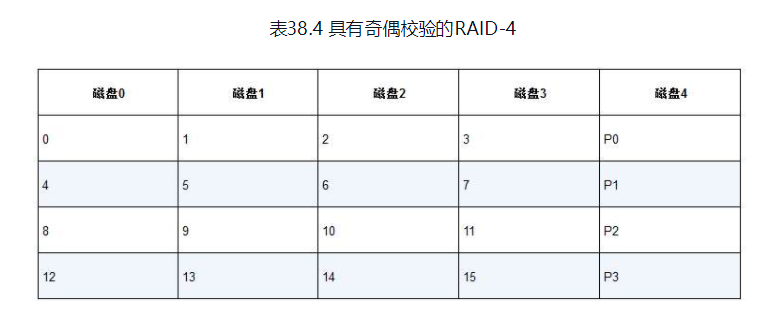
RAID 4级: 奇偶校验
RAID 5级: 旋转奇偶校验

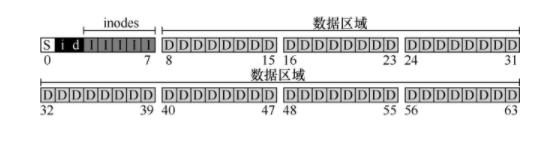
第40章 文件系统实现
S 是超级块,储存文件系统的信息,包括文件系统中有多少inode和数据块
i 是inode的位图
d是data的位图
I 是inode的实际储存
D是data的实际储存
inode
inode是文件的低级名称,储存了文件的元数据结构,长度、权限、存放位置等。
多级索引
ext2文件系统中,inode上存放位置信息的是15个磁盘指针,为了支持更大的文件,可以引入间接指针,inode可以拥有固定数量的直接指针和间接指针,间接并不指向用户的数据块,而是指向包含更多指针的块。为什么要用这样一种设计,为什么要用这样的不平衡的树?
原因是研究表明,大多数文件非常小。
基于链表的储存
为什么不用链表来连接数据块,让一块数据块的末尾指向下一块数据块?总所周知链表的查询是O(n)的,所以如果我们想要读取文件的最后几个字节,这将直接导致我们读取几乎整个文件。
空闲空间管理
我们用位图来表示空间是否被占用。早期的文件系统使用空闲列表指针(参考操作系统内存分配算法中的空闲列表指针)
打开文件/foo/bar.txt
假设超级快已经在内存中了
1 | graph TB |
写入、创建文件/foo/bar
写入文件比读取复杂很多,如果要分配额外的块,写入将导致至少5次IO: 读取数据位图、写入位图、两次读取然后写入inode、最后写入真正的数据块
创建文件就更加复杂了,读取inode位图、写入inode位图、写入新的inode(为新建的文件分配inode)、写入目录数据、更新目录的inode,如果目录会增长,还要额外的IO来处理数据位图和新目录块。
接下来我们演示创建文件/foo/bar并写入3个块的数据, 可以看到里面有大量的IO
1 | graph TB |
如何降低IO成本
读取文件可以引入缓存,早期的文件系统引入固定大小的缓存来保存常用的块,现代系统使用动态大小来进行缓存。
写入文件可以引入缓冲,现代文件系统会将写入在内存中缓存5~30秒,然后分批写入
第41章 局部性和快速文件系统
早期的文件系统把磁盘当作内存来管理,完全忽略了磁盘昂贵的定位成本,导致性能不佳。
磁盘碎片问题,由于文件系统的不断使用,导致剩余的数据空间都是一些零星的碎片,当我们分配一个较大的文件的时候,他的数据块将散布到这些零星的位置,这将直接导致当我们读取他的时候会有很多磁盘的寻道定位现象,这严重影响了速度。
FFS
FFS将磁盘分成很多个块
利用局部性, FFS利用文件的局部性,很多应用程序在访问文件的时候,大多情况都具有局部性,当你访问了一个目录的文件以后,有很大的可能访问同目录下的其他文件,所以FFS将他们尽量组织在一同一个块
对于大型文件,FFS会将大文件散布到所有的块中
第42章 崩溃一致性:FSCK和日志
我们对文件的写入通常有很多次IO,如果在这期间操作系统崩溃了,我们该怎么办
- 定期检查整个文件系统, 但是这无法处理垃圾数据(inode指向了无效的被分配了的数据块)
早期的文件系统采用了一种简单的方法来处理崩溃一致性。基本上,它们决定让不一致的事情发生,然后再修复它们(重启时)。这种偷懒方法的典型例子可以在一个工具中找到:fsck[插图]。fsck是一个UNIX工具,用于查找这些不一致并修复它们[M86]。
- 预写日志
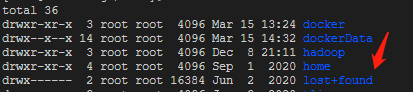
参考数据库系统的预写日志,先写TxBegin代表事务开始,然后写入事务的元数据,接着指向日志,最后写入TxEnd代表事务结束,如果在写入TxEnd后或者写入TxBegin前崩溃,能确保没有丢失数据,如果只有TxBegin没有TxEnd,我们可能需要启动文件系统扫描程序来检查了,Linux将这些发现的文件放入lost+found文件 夹中
- 主席树(Copy On Write)
第43章 日志结构文件系统
LFS
文件系统如何将所有写入转换为顺序写入?对于读取,此任务是不可能的,因为要读取的所需块可能是磁盘上的任何位置。但是,对于写入,文件系统总是有一个选择,而这正是我们希望利用的选择。
引入的新型文件系统Rosenblum和Ousterhout称为LFS,是日志结构文件系统(Log-structuredFile System)的缩写。写入磁盘时,LFS首先将所有更新(包括元数据!)缓冲在内存段中。当段已满时,它会在一次长时间的顺序传输中写入磁盘,并传输到磁盘的未使用部分。LFS永远不会覆写现有数据,而是始终将段写入空闲位置。由于段很大,因此可以有效地使用磁盘,并且文件系统的性能接近其峰值。
全新的Inode设计
LFS不把inode用数组的方式组织在inode块中,而是让他和他指向的文件放在一起,这将极大的加速访问。如果我们更新了文件,就一定要更新他的inode
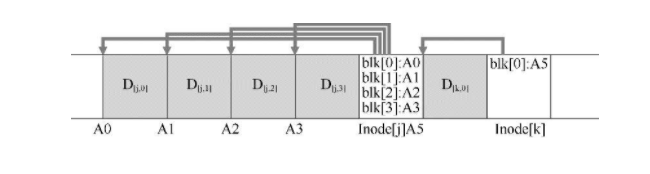
由于indode散播到了各处,我们定位inode就有了麻烦,而且inode还一直在转移位置,LFS引入了间接层,imap,输入旧的inode,输出inode最新的位置
但是imap也需要持久化,imap放在哪?
实际上imap也和缓冲一起持久化到了磁盘。
但这又引发了问题,去哪儿寻找最新的imap?实际上在LFS中有一个固定的CR检查点区域储存着这些信息。他也会定期更新。
垃圾收集
你可能已经注意到LFS的另一个问题;它会反复将最新版本的文件(包括其inode和数据)写入磁盘上的新位置。此过程在保持写入效率的同时,意味着LFS会在整个磁盘中分散旧版本的文件结构。我们(毫不客气地)将这些旧版本称为垃圾(garbage)。
实际上有一个后台程序在负责垃圾清理
什么是垃圾?
LFS把整个磁盘分为一些块,他将一块一块的使用,并一块一块的清理,LFS在每个块中记录该块有哪些inode,垃圾收集程序只需要检查这些块的inode在imap中是否存在映射关系即可判断块是否为垃圾。
崩溃恢复和日志
CR会崩溃,块也会崩溃
CR: 维护两个CR,交替写入他们,并记录CR时间戳
块: 使用预写日志恢复
第44章 数据完整性和保护
磁盘故障
磁盘并不完美,并且可能会发生故障(有时)
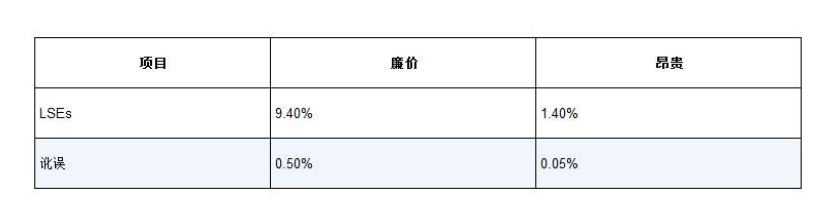
潜在扇区错误 LSES
磁头碰撞导致扇区表面被破坏,或者宇宙射线导致某些位翻转。
块讹误
例如,有缺陷的磁盘固件可能会将块写入错误的位置。
类似地,当一个块通过有故障的总线从主机传输到磁盘时,它可能会讹误。
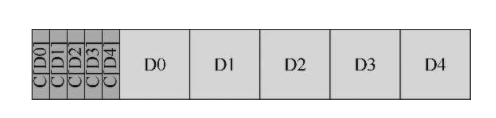
校验
奇偶校验、fletcher二阶前缀和校验、CRC校验
磁盘厂商保证每个块520字节,多的8字节存放校验和
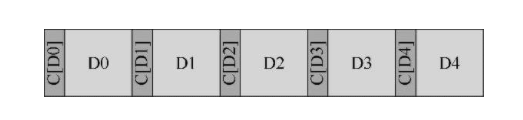
如果没有保证就使用这个办法
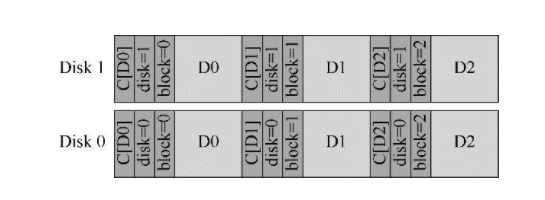
错误位置写入
磁盘驱动器把数据写到错误的位置了,旧块能匹配校验和
我们增加更多的冗余,磁盘号,块号,这样就不会出现错误位置写入的问题了
写入丢失
磁盘驱动器把数据写如丢失了,旧块能匹配冗余
- 写入验证: 写入后立即读取
- 在inode中也储存校验和
第47章 分布式系统
这部分内容比较老,不如参考hadoop